Robotic and Electrical Engineering Experience
Tian Zhang

Story began when I finished my high school and decided which university to go and what major am I going to study. Not with much hesitate, I chose to go to Beihang University -- Beijing University of Aeronautics and Astronautics, and I chose Automation Science and Electrical Engineering as my major because I have a dream of buiding robot from a child.
In the following four years, I devoted myself into study and research. Not only study theory of building a robot, such as electrical circuits, control theory and coding, but I also work on Lab to design my own robot, check here to see the project I'm most proud of -- Deformable Snake Robot, it took me around a year, with countless nights spending at lab, to finish it, but it totally worth! I also did other robot and sensor networks projects, all listed here
My undergraduate study experience inspired me to keep learning and applying state of art technology to facilitate improving human's life. Robot is indeed a good way to facilitate human life. However, as my experience and understanding goes deep on robot, I find that building a hardware robot in real world is not that sample as I first thought. It has many restrictions, especially greatly suffer from research investment. So I begin to thought why don't I build some software 'robots' that has less cost? Then I meet Machine Learning, I noticed that this is exactly what I what! some sort of 'mind robots' that automatically finish human job!

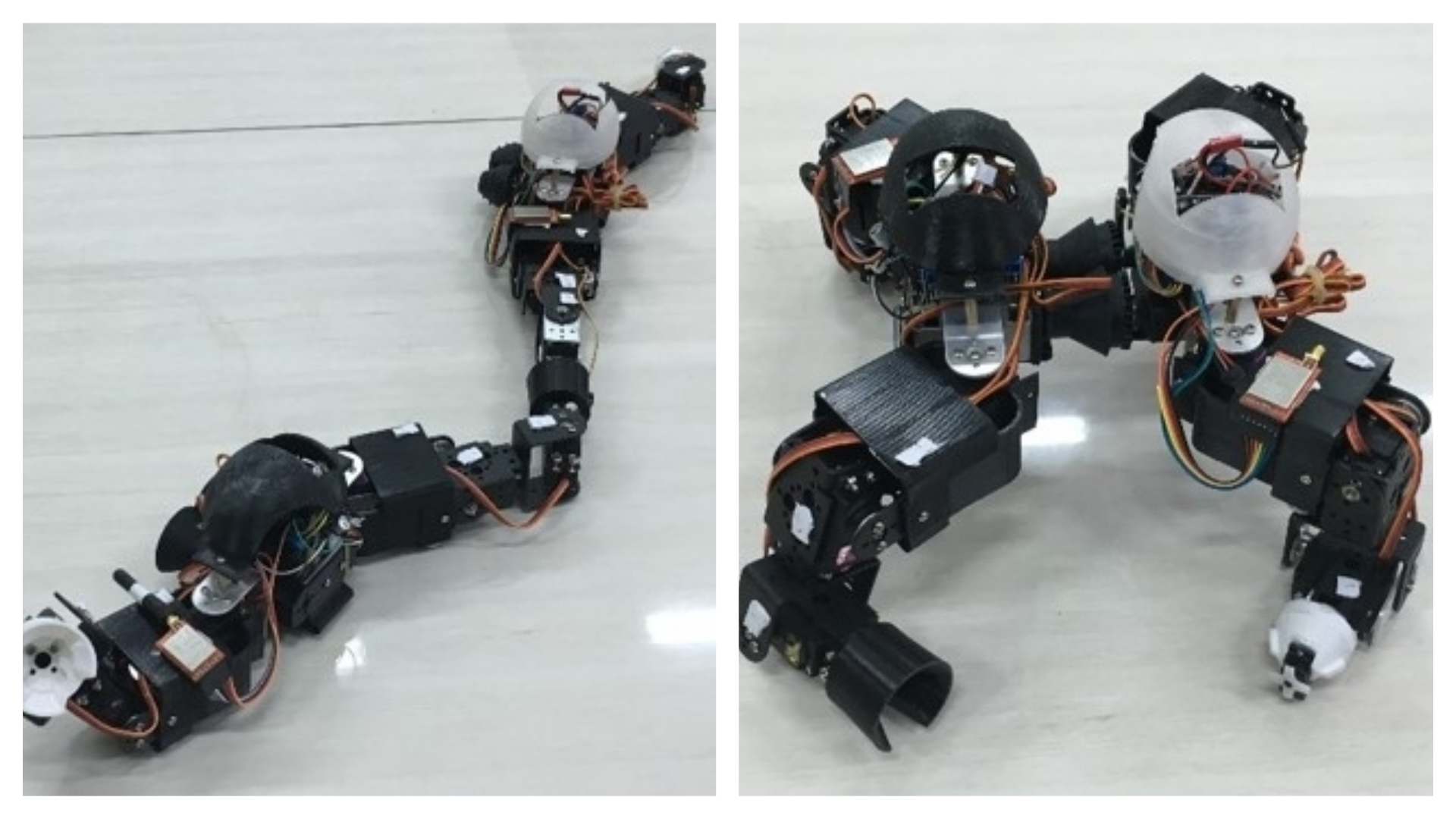
In this project, we aimed to built a robot, which can be used in searching rescue after diseaster such as earchquake.The robot has the ability of working in difference terrains such as narrow space under ruins and complexity conditions on the top of ruins. In order to achieve these purpose, the robot has two work forms:
1.snake form: make it easier to work in narrow area such as tunnel or under ruins
2.quad ruped form: working in complex terrains, with obstacle such as rocks and steps
We designed a new robot that combine the advantage of both snake robot and quardpeded robot, it will change its form automatically based on the environment. Our robot was built based on the conception of a modular robot. Each snake chains was a simple robot where two chains work like a snake or quadruped shape. It's also possible that more than two snake chains(4 or 6) connect and work together to finish the rescue task. To control the robot, we used centralized control method, the master chain control the whole network. Sensors such as ultrasonic and camera are also attached to help rescue.
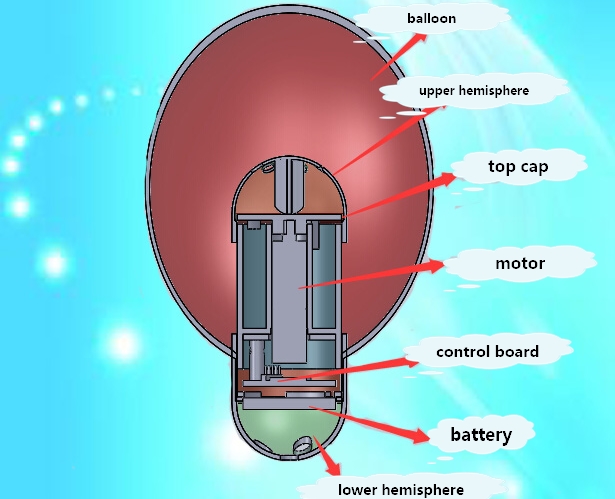
In this project, we aimed to design an edible intragastric capsule to help users lose weight based on the technology of intragastric balloons. Generally speaking, patient swallow this tiny robot. When it goes down to patent's stomach, it begins to work. The capsule robot will expand to 3-4 times of it's origional size by wireless control. Because it stays in patents stomach with a big size, the patient feels full and don't want to eat, which helps them to loss weight. At the end of treatment, the robot reduces to its original size, and can be expeled through normal excretion.
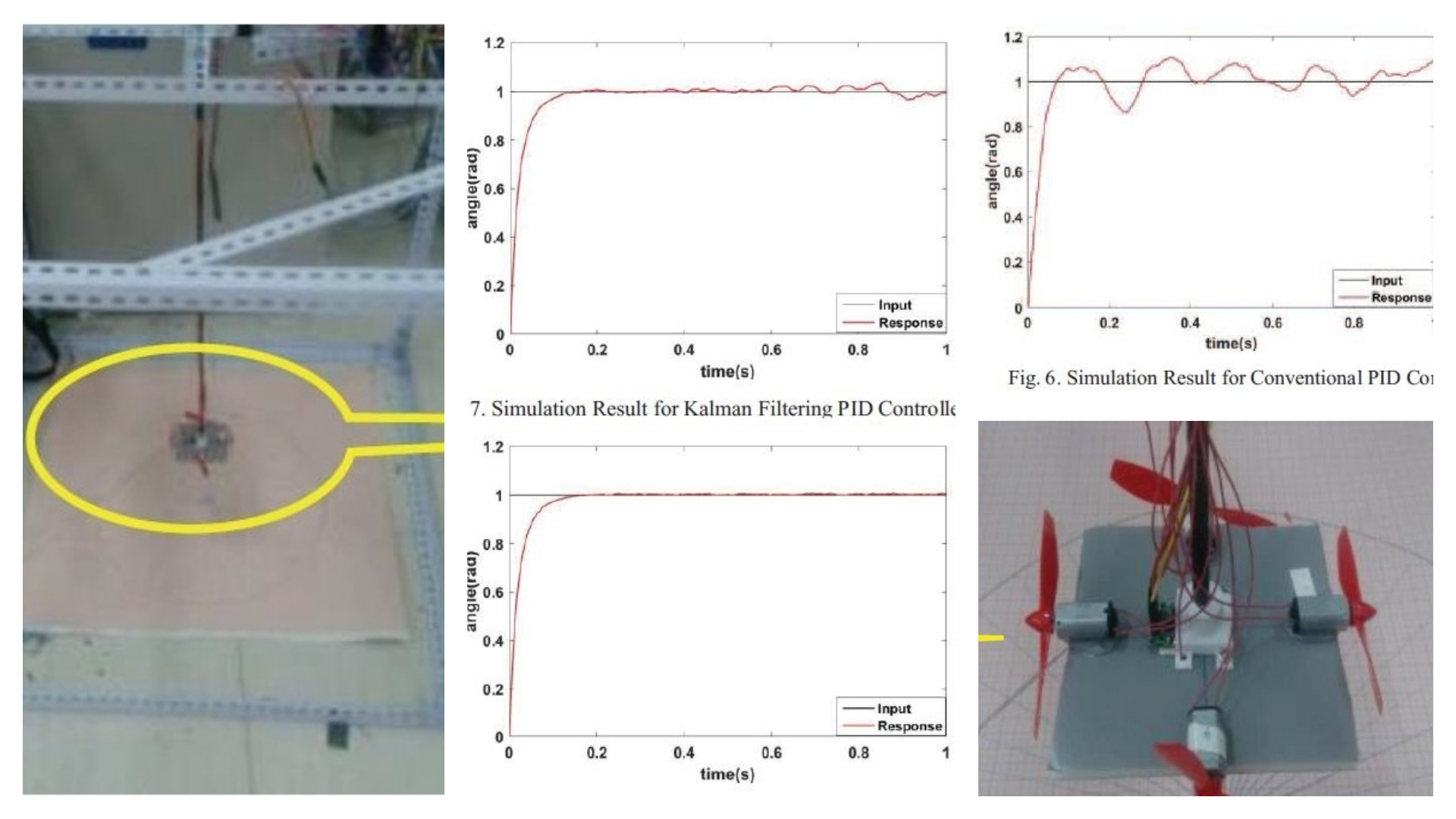
Wind pendulum is a three dimension(3D) pendulum that at the end of pendulum there is a platform attached four fans facing four different directions. When the pendulum is swinging, it's swing speed and angle was controlled by generating wind from four fans. This system is an nonlinear system with high latency. First, fans itselve is an nonlinear system, it's hard to build a dynamic model of force generated by fans rotation. second, there's always unpredicted latency of force genarated by propeller rotation, which makes it really hard to build an timely control system.
We analysis the wind pendulum system and built the danamic model, applied PID and PID with Kalman Filter as the control methods to control the pendulum system. We finished simulation in Matlab and built a test platform to apply control methods on it.

In this project, we designed an accessory aiming to guide blind people, help them avoid dager such as moving vhecle or front obstacle. The accessory was embedded in a glove, it has the functions of:
1.detect distance between user and obstacle of three direction (front, left front, right front), and calculate speed if the obstacle is moving. Give user feedback of distance or speed.
2.prediction if the user will encounter dager in the next 5 seconds.
To achieve these goals, our blind glove was besigned based on a small sensor networks with three ultrasonic sensor and several motors. we used three vibration motors attached on the fingerpad of glove as the distance and speed feedback. Speed and distance will be reflected roughly by vibration level.
This project aimed to implement a moving detection system of lower-limb exoskeletion.
Exoskeletion can improve patients' movement ability and help them recover. In this project, I designed a moving detection system by FPGA chip and six encoders, and intergrated this system into the exoskeleton central control system. Besides, I designed two gaits for recovery training. One gait minimize the power of ankle while the other mimimize the power of knee, these two gaits work for a patient with ankle or knee problem.

Y. Long, J. Xiao, T. Zhang and H. Cheng,
Modeling and control for swing and anti-swing of
a wind pendulum, Conference on Industrial Electronics and Applications (ICIEA), 2016.
H. Cheng, J. Xiao, Y. Long and T. Zhang,
Wind pendulum modeling based-on improved PID
algorithm, Conference on Industrial Electronics and Applications (ICIEA),2016.